Mitsui O.S.K. Lines (MOL) is researching collision avoidance algorithms. The goal is to develop a navigation support system that will lead to autonomous collision avoidance, using rule-based artificial intelligence and a deep reinforcement learning algorithm.
This will enable systems to estimate several Obstacle Zones by Target (OZT) among different ships and propose a route that minimises the risk of a collision.
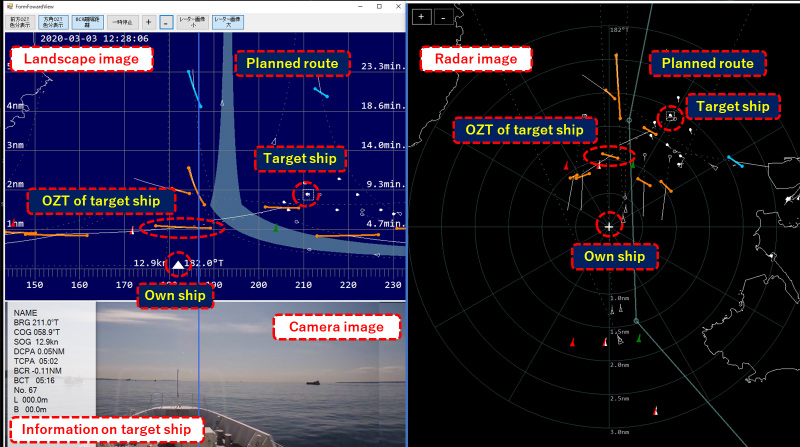
Demonstration testing with Tokyo University of Marine Science and Technology’s Shioji Maru has been conducted in congested sea areas such as Tokyo Bay as a part of continuous efforts to develop computational algorithms using OZT and avoidance route computational algorithms. The test confirmed the ability to estimate OZT for several target ships in actual operation and develop and suggest avoidance routes in real time onboard.
The test also aimed to develop a collision avoidance system that realises medium-to-long-term strategies for avoidance navigation well before target ships pose a risk in congested sea lanes, and takes into consideration the experience of the maritime officer and other personnel in terms of safety and security.
For the study MOL teams up with MOL Marine Co., National Institute of Maritime, Port and Aviation Technology (MPAT), Tokyo University of Marine Science and Technology, MOL Techno-Trade, and YDK Technologies.
Picture: Demonstration test in Tokyo Bay using the OZT screen of Tokyo University of Marine Science and Technology’s Shioji Maru (landscape image/radar image/camera image). Target ship: Equipped with Automatic Identification System (AIS) and Target Tracking (TT).