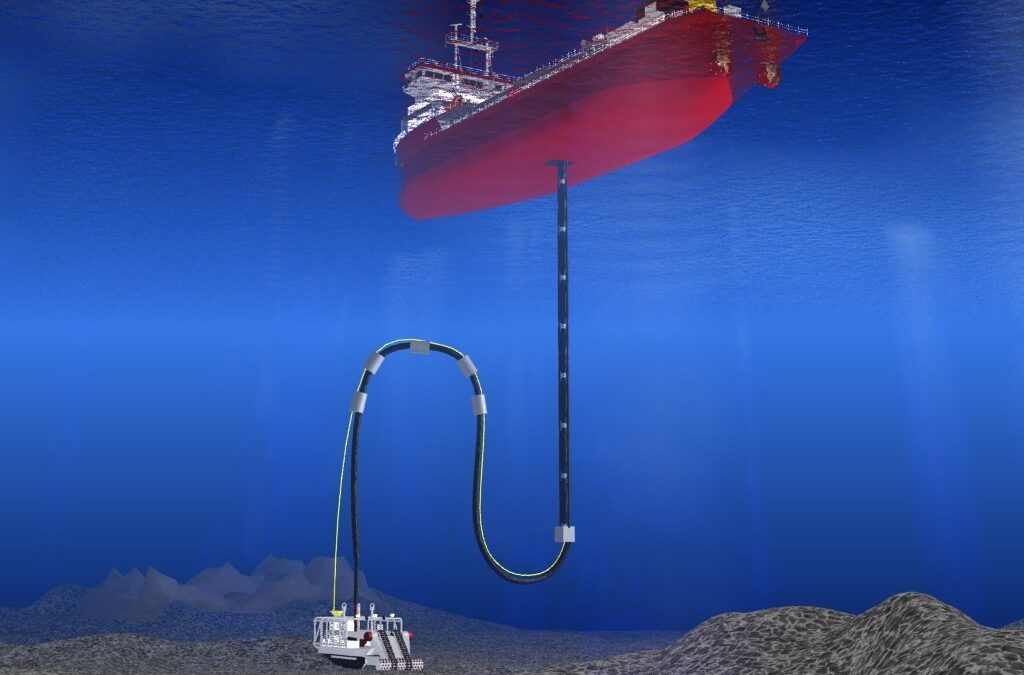
‘Vertical transport over a five- to six-kilometre vertical distance has its challenges,’ admits Laurens de Jonge, Manager Marine Mining at Royal IHC. As part of the EU subsidised programme Blue Mining, the company developed a riser system with oil-free electric motors that can reach the polymetallic nodules on the ocean floor.
 Deepsea mining requires a full mining value chain to take off: the right licences and permits, deposits, the harvesting technology (vehicle, transport system, mining vessel), processing and refining of the materials and the right logistics. Over the past twelve years, Royal IHC has been developing an integrated deepsea mining solution, comprising a crawler and riser system as well as mining vessel designs to harvest polymetallic nodules from water depths of up to six kilometres.
Deepsea mining requires a full mining value chain to take off: the right licences and permits, deposits, the harvesting technology (vehicle, transport system, mining vessel), processing and refining of the materials and the right logistics. Over the past twelve years, Royal IHC has been developing an integrated deepsea mining solution, comprising a crawler and riser system as well as mining vessel designs to harvest polymetallic nodules from water depths of up to six kilometres.
SWZ|Maritime spoke to De Jonge and his colleague Wiebe Boomsma, Manager R&D at Royal IHC, to discuss the deepsea mining landscape as well as the mining solution developed by the company. In the first article published last week, we looked at the different deposits, the development of offshore mining regulations as well as the relation between deepsea mining and the energy transition. In this second article, we look at the riser system IHC developed.
Blue Mining
The original plan was to investigate deepsea mining with a group of Dutch companies, but in the end it became a European cluster. ‘With European partners and subsidies we worked on sustainable solutions,’ explains Boomsma. ‘The first programme was Blue Mining, which focused on the development of a riser system to bring the resources to the sea surface.’
‘Vertical transport over a five- to six-kilometre vertical distance has its challenges,’ admits De Jonge. ‘We looked at, among other things, what happens with a slurry when you pump it over such a long distance, what about density waves, what is the chance of a blockage in the riser?’ explains Boomsma. ‘So, actually the flow assurance and controlling the flow was a main part of the study. We did that together with the Delft University of Technology. It was PhD work of our colleague Jort van Wijk.’
‘Parallel to this, we looked at what happens with such a riser pipe dynamically. You have a five-kilometre string hanging from a moving vessel, resulting on riser motions. What kind of movements do you get in such a pipe and how harmful is it, especially when you go sailing? These are motion induced vibrations (ship movements) and vortex induced vibrations (caused by currents as a result of sailing). Both were investigated in Blue Mining,’ says Boomsma.
We also looked at what happens with such a riser pipe dynamically
Flow Assurance Testing
‘We also developed a model for flow assurance, which we tested in our lab on a ten-metre scale.’ De Jonge adds: ‘We did this with plexiglass pipes with cameras on them. What you can do with a ten-metre pipe, is that if you suspect that certain phenomena may occur, you can actually reproduce them. If your model says, the particles are going to overtake each other in the pipe and clog it, then you can set the parametres in such a way, that you actually see it.’

Laurens de Jonge (left) and Wiebe Boomsma.
Boomsma: ‘Because the step from ten metres to five kilometres is a big one, we also did tests in an air shaft of an abandoned silver mine in eastern Germany where we could go down 135 metres and up again creating a 270-metre loop. That’s still not five kilometers, but it brings you a lot closer. Furthermore, the purpose of these tests is not so much to demonstrate the operation of a vertical transport system with riser technology, but rather to validate the theoretical, mathematical model behind it.’
Seawater Filled, Cooled and Lubricated
 In the oil and gas industry we have already reached a depth of about 3.5 kilometres. Yet, this is not comparable to deepsea mining according to Boomsma, because ‘oil has a lower density than water and wants to go up anyway. We have a slurry of seawater and particles that has a higher density than water and therefore does not want to go up at all, which requires us to use pumps.’
In the oil and gas industry we have already reached a depth of about 3.5 kilometres. Yet, this is not comparable to deepsea mining according to Boomsma, because ‘oil has a lower density than water and wants to go up anyway. We have a slurry of seawater and particles that has a higher density than water and therefore does not want to go up at all, which requires us to use pumps.’
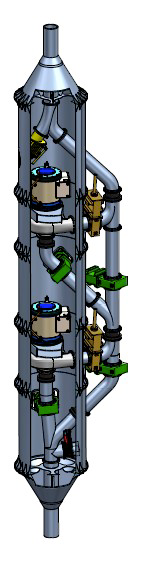
‘We developed a special electric motor which is seawater filled, seawater cooled and seawater lubricated. This eliminates risks of an oil spill, the engine cannot be damaged by seawater in case of a leakage and you don’t need an oil cooler or pressure compensating system, which allows for a compact unit. You need twelve such units for a five-kilometre pipeline, fourteen for six kilometres.’
Riser Design
Boomsma continues: ‘The riser will be made of steel, possibly high-tensile steel. We have up to five different types of pipes for different water depths. If the pipes would have identical steel thickness, it would become too heavy and collapse under its own weight. So the further down, the lighter the construction becomes. The riser itself is always under excess pressure, so it does not collapse. You always have an excess pressure of 20 bar that drops to just above zero just before the next pump in the line.’
‘When it is not pumping, there is pressure from both sides, because there’s seawater inside,’ explains De Jonge further. ‘This will hold the shape. The pump, for example, will never cavitate due to the overall higher pressure at depth.’
This is the second in a series of four articles about deepsea mining. The next article will be published next week and will describe the crawler and collector Royal IHC has developed as part of its deepsea mining solution. The full article will also be published in SWZ|Maritime’s January issue.
Pictures by Royal IHC.