Currently, several means of transport are undergoing an accelerated development towards automation and automated movements. This development will also impact future ship handling with tugs. A glimpse into the future of tug boat operation.
In the following exploratory article, Master Mariner Henk Hensen, Naval Architects Johan de Jong and Markus van der Laan and former tug boat captain Daan Merkelbach delve into tug boat operation between now and 2050. In addition to the developments in autonomous technology and the associated risks and how this will impact ship handling, developments in ports and in propulsion technology are some of the other issues discussed.
1. Slow Transition
Almost daily publications appear about automation in shipping. Names of large maritime industrial companies are often found in these publications, giving the idea that they are a major driving force behind these developments. The question can and should be asked, how realistic are these developments; are they generally applicable, applicable for certain sectors or trades, or perhaps not applicable at all?
It seems there are parallels with the transition from sail to steam in the past. The first steam vessel that crossed the Atlantic Ocean was the Savannah in 1818. Yet, almost 100 years later, large sailing vessels were still being built, such as the Pamir (1905). The transition took place slowly, but steadily and step by step from sail towards steam and sail and then to full steam. Is this the way it might go with the evolving change towards autonomous ships and tugs, but in a faster way?
‘It is very hard to predict, especially the future.’ Niels Bohr.
1.1 Future Autonomous or Remote Controlled Tugs
In the recently published book “Tug Use in Port. A practical Guide” [1] in a pragmatic way attention has been paid to future autonomous or remote controlled tugs. This article also specifically addresses future ship handling with tugs, and the factors playing a role during the intermediate period and with a final focus on the year 2050. Though it must be said, the farther away from 2050, the more Mr. Bohr’s saying comes true.
In order to get a good idea of the future situation in which tugs will play a role, insight into how shipping will develop in the coming years is needed. Therefore, this article starts with a framework of maritime developments relevant for the ship handling part of the future. It first looks into future vessels and developments in ports and transhipment areas. Obviously wider societal trends which affect ship operations are looked at as well in this reconnaissance.
Factors are addressed which play a role in present ship handling and are likely to continue to do so in the future. Thereafter, the present situation will be reviewed with respect to the level of remote control, autonomous sailing and expectations in this field. Finally, the situation towards and around 2050 will be addressed.
2. Developments in Ships & Tugs, Ports & Society
There is hardly uniformity in ships. They differ in type, size and design and further differ in their operational characteristics during each trip because of changes in draft and trim. Also deck cargo differs, as can be seen with container vessels, again affecting their behaviour and tug assist requirements.
The variety in type and size of ships determines the type, size and lay-out of ports, including offshore terminals. The variety in ship design applies to tugs as well, however to a lesser degree. Even when of the same design, they can differ in power, draft and trim.
Ships and ports will certainly develop in the coming years and tugs will have to keep pace with these developments. It will all be addressed in the following paragraphs. Although a large variety in ship types and sizes exists, the way the forces from the tug to the ship are transferred has never changed and is either by means of a towline connection between tug and ship's deck bollard or by pushing contact between tug and ship's hull. This important point will also be dealt with.
2.1 Ships & Tugs
2.1.1 Ships
The influence of automation on ships during the coming thirty years have been presented in a schematic way in figure 1.
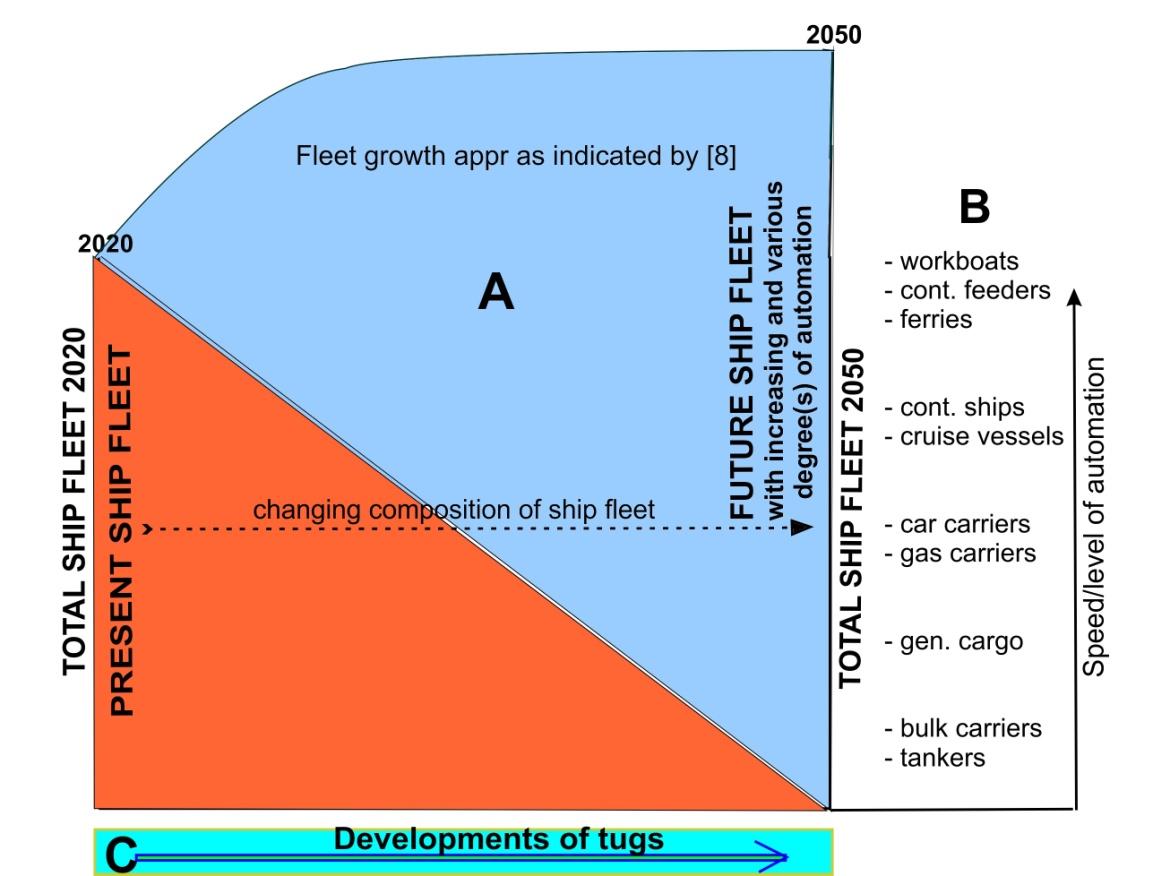
Figure 1. Schematic view of influence of automation on ship fleet in the next thirty years.
In part A of figure 1 is shown the gradually decrease of present ships to zero in the coming period of 30 years and the large increase in ships with some kind of automation in the same time span, including a growth in world ship fleet tonnage, which is based on the estimates of DNV-GL [8]. With respect to the latter, UNCTAD expects a much larger growth of global seaborne trade, viz. approximately 1.7 as high as indicated in figure 1; compared to 2016 the cargo to be transported will triple by 2050, which has large consequences for ports and port services like tugs [24].
The IMO’s Maritime Safety Committee identifies four degrees of ship automation [2]:
- Degree one: Ship with automated processes and decision support: Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated and at times be unsupervised but with seafarers on board ready to take control.
- Degree two: Remotely controlled ship with seafarers on board: The ship is controlled and operated from another location. Seafarers are available on board to take control and to operate the shipboard systems and functions.
- Degree three: Remotely controlled ship without seafarers on board: The ship is controlled and operated from another location. There are no seafarers on board.
- Degree four: Fully autonomous ship: The operating system of the ship is able to make decisions and determine actions by itself.
This article will use the same classification. What is regarded as an autonomous ship is stated in following definition: An autonomous ship is a marine vessel with sensors, automated navigation, propulsion and auxiliary systems, with the necessary decision logic to follow mission plans, sense the environment, adjust mission execution according to the environment, and potentially operate without human intervention (E-Navigation 09/01/19).
Part B shows an assessment of the speed and level of automation for certain ship types during the coming years. Workboats and relatively small and uniform ship types with a regular trade on short routes will be upgraded faster and to a higher degree, than for instance tankers and bulk carriers.
Retrofitting existing vessels to a serious level of automation is unlikely given the grossly unreliable existing equipment. To what level new buildings will take part in the autonomous developments is hard to say. UNCTAD states [3]: `While the development and use of autonomous ships offer numerous benefits, it is still unclear whether this new technology will be fully accepted by Governments, and particularly by the traditionally conservative maritime industry.’
DNV-GL states in its Position Paper 2018 [25]: 'It is important to note that more than half of the world population still has no access to Internet services, thus there are regions and social groups without the capabilities to take advantage of the new possibilities emerging. This means remote-controlled and autonomous shipping is likely to deepen existing inequalities across social classes and countries unless measures are put in place for technology transfer, social protection, and re-skilling of crew’.
The International Group of P&I Clubs states in their Annual Review [4]: `Despite the hype surrounding current projects, it is worth noting that the view of many industry observers is that deep sea vessels are not likely to operate fully autonomously in the medium term. More likely is the use of advanced systems, sensors and artificial intelligence to support vessel operations’. An example is the recently launched Very Large Ore Carrier Pacific Vision which is outfitted with an integration platform, a smart navigation decision support system, a ship energy efficiency management and optimization system, and a smart-vessel operation and maintenance system [5].
Intelligent systems such as:
- Remote Monitoring/Diagnosis (RM);.
- Condition Monitoring (CM) and
- Condition Based Maintenance (CBM),
are becoming widespread, first on "manned ships". The systems will then obviously be implemented on Maritime Autonomous Ships (MASS) as they are intrinsic to ensuring the required level of technical safety of these ships [39].
It all means that there will not be a uniform transition of remote controlled and autonomous technologies. It will go in different phases, also seen worldwide. The same applies to ship types as mentioned above. The present consensus is indeed that in the short to medium term, fully autonomous vessels will primarily be small vessels designed for a specific purpose e.g. (sub)sea survey, or vessels designed to operate a specific trade within limited trading areas such as e.g. the Yara Birkeland.
There also are several factors that could create uncertainty about the prospects of seaborne trade [3] which may have their effect on the process of automation of ships, such as geopolitical risks, economic and trade policy risks and structural shifts in economies. Likewise the transition to non-fossil fuels could affect the shipping industry and the to be used in board systems.
Other ship developments may include the manoeuvring capabilities of ships, particularly of large container vessels, ferries and cruise vessels, which will reduce the need for tug assistance. The size of certain type of ships will also further increase, which will affect the number of ships in service, although it is not expected to the same degree as has been the case in recent years with container ships, gas carriers and bulk carriers.
In addition, new methods of sea transport may be developed and certainly all the activities at sea will introduce new design features for new ship types. Other transport systems may take over. For instance, underwater transport by `ship’ may become reality or transport by pipe lines, having its effect on conventional seatrade, ports and tug assistance. See for instance the idea of container transport through high speed tubes, the hyperloop system, at Hamburg Port [6].
Therefore, the composition of the world ship fleet as indicated in figure 1 changes in the coming thirty-year period. For instance, the number of general cargo ships decreases as is the case with tankers; the latter mainly due to more local energy production, ashore and/or at sea, and the phasing out of liquid fossil fuels. The number and size of container ships may further increase.
So, from the above it can be seen that not only automation will have its effect on ships and world ship fleet, but many other factors may be involved. All the changes are of paramount importance for future role of tugs and tug assistance.
2.1.2 Tugs
Part C indicates how tugs, which have at present already to deal with a large variety in ships, should closely follow the future developments as mentioned above. On the other hand ships will, to certain extent, have to follow the developments in tugs with respect to performance, assisting capabilities and tug power.
It is important to realize the various tasks assigned to tugs. The tugs mentioned below are often capable of performing other tasks as well. Tugs to be used for ship handling in or near ports, at offshore terminals or near the coast, can basically be classified as follows:
- Harbour tugs, which operate in ports and port approaches and may be certified, manned and equipped in such a way that they can operate at sea, e.g. as an emergency tug.
- Terminal tugs, which operate at offshore terminals, such as LNG facilities.
- Escort tugs. Specifically built to escort tankers, gas carriers, and sometimes bulk carriers and very large container vessels at a relatively high speed in port approaches.
- Emergency towing vessels situated along the coast to tow vessels in emergency.
The future developments in ships, such as their increasing realisation of autonomous or remote controlled technology on board, increased size and/or manoeuvring capabilities, creates new situations to be aware of.
Most automated ships, such as remote controlled or autonomous ships, will still experience engine or steering failures as is the case with present ships. If this happens at sea along the coast and such problems cannot be resolved in time, specific assistance of emergency towing vessels or suitable harbour tugs will be needed for such ships. Immediate assistance is also needed if failures happen on board remote controlled or autonomous ships in port areas and port approaches. It means that such ships should be equipped in such a way that tugs can handle them and bring them to a safe location, as already provided by tankers with their emergency towing systems.
There is another aspect which concerns ships with increased manoeuvring capabilities in restricted waters. When environmental conditions become such, for instance very strong winds, that even these ships which normally would not use any tugs, have to use tugs to keep the ship under control. Consequently, there is always a need for a sufficient number and power of tugs to be available.
Apart from the former mentioned requirements, it should be kept in mind that some or all harbour tugs in a port should also be capable to perform also other tasks required in a port, such as barge handling, handling of oil rigs and other offshore (floating) material, lock and bridge passages, etc. and should be capable to deal with emergencies in or near a port, including fire fighting.
All these demands create consistent challenges on future tug designs and operational capabilities. There are, however, more developments in the future, setting additional requirements for tugs and tug assistance as explained in the next paragraph.
2.2 Ports & Society
Not only ships change. From the foregoing it can be learned that an appropriate continuous change in port lay-out and port equipment follows, as seen with the development of containers and container terminals. Automated container terminals, operating largely autonomously, and with remote operators are already found.
Apart from geopolitical developments, which are impossible to predict, a net growth of total maritime transport with changes in cargo composition will affect ports. The need for measures anticipating and/or mitigating climate change which next to their technological and economical impact on ships will also influence the types of cargo and port infrastructure. A development which is certain to happen in the next thirty years. As an example, some of these changes are already visible in today’s energy supply predictions. See figure 2.
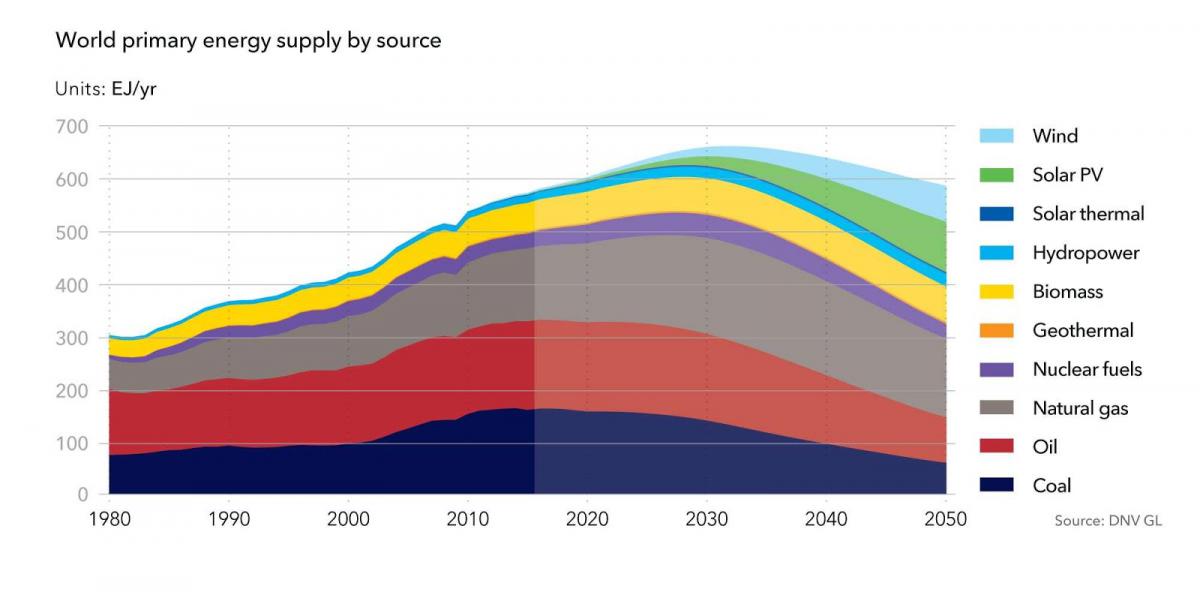
Figure 2. Energy supply by source
According to the Energy Transition Outlook 2018 of DNV-GL [7] the world needs less energy from the 2030s onwards owing to rapid gains in energy efficiency. DNV-GL forecasts that the primary energy supply peaks in 2032 while oil demand peaks in the 2020s and then decreases. Natural gas takes over as the biggest energy source in 2026. This affects the type of seaborne trade.
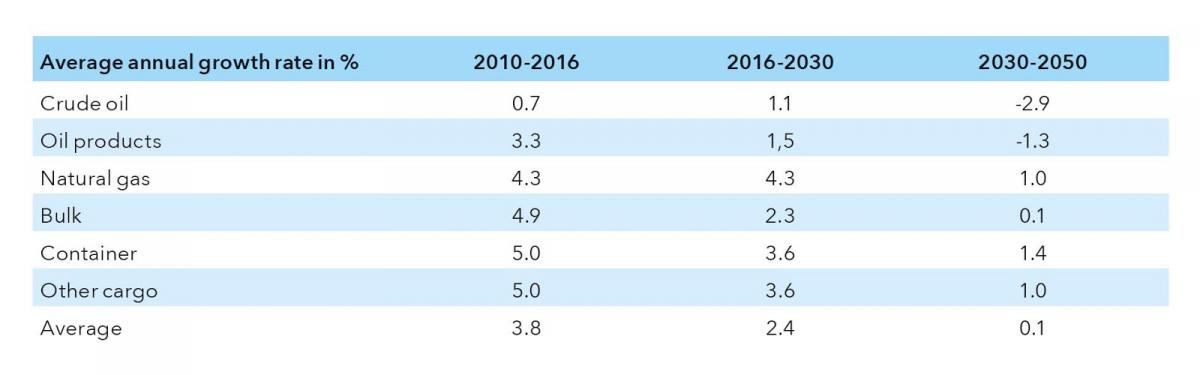
Table 1. Estimated percentage average annual growth in tonnes (source: DNV GL: Maritime Forecast to 2050, eto.dnvgl.com/2018).
Table 1 shows how seaborne trade is expected to change till 2050. DNV-GL forecasts a 39% rise in seaborne trade measured in tonnes over the period 2016–2030 and a 2% rise for 2030-2050. The largest relative growth in transportation demand is for gas and container cargo, both growing about 120% to mid-century [8]. Transport of crude oil and oil products decreases quickly after 2030. See also the much higher seaborne trade expectations of UNCTAD mentioned in par. 2.1.1.
It means that the composition of the world fleet will change considerably. At the same time the required levels of safety for transporting these likely more dangerous goods like gas continue to increase. Society accepts fewer risks in transport because of the environment as well as because of the risks to humans.
In addition, on a wider level it is envisaged that the exploitation of the seas and oceans increases, which will bring more vessel movements and changes in the activities in and near ports. Examples of the increasing exploitation of the sea are the growing of seafood, collection of renewable electric energy and the subsequent storage and production of useable energy carriers like hydrogen, methanol or synthetic LNG.
These are just a few examples. As said, these developments will all have their effect on a port’s infrastructure and on the need for tug involvement. It is expected that ports will undergo certain developments, due to the growth in seaborne transport, change in fleet composition, offshore activities, and also because of the expected growing size of ships, such as container ships and probably gas carriers.
The growing size and high safety requirements may result in a need for tugs to make fast outside the breakwaters in wave conditions. Future developments may include more gas terminals to be located offshore and away from residential areas because of the risks involved. Ports and transhipment areas moving into more exposed conditions could be a long term development, further supported by increasing offshore activities, offshore terminals and perhaps offshore (floating) ports with less possibilities of building long protective breakwaters. The Horizon 2020 project Space@Sea is a project by MARIN and 16 partners which studies the feasibility of floating ports at sea [9]. Such an island supporting the offshore energy supply. It can therefore be concluded that ship handling in exposed conditions will continue to grow in importance.
Tugs have to deal with all these changes and the related requirements for future tug assistance, which means amongst others they should be able, depending on the port, to operate also in wave and swell conditions. The growth in transport concerns in particular ships with a high windage, such as container ships and car carriers, will require tugs to be capable of handling these ships in windy and wave conditions.
To Conclude
Up till now we have discussed the expected future situation with respect to developments in shipping and ports and the requirements for tug assistances. In the next section, the focus will be more and more on the actual ship handling by tugs in the future. Therefore, the present situation with respect to future tug assistance is reviewed, in the first place with respect to present aspects and challenges that will require attention in the future too; secondly with respect to the present state of automation in ships, tugs and tug assistance.
3. Important Aspects on the Way Towards More Tug Autonomy
From the foregoing it has become clear that there is a strong relationship between tugs, ships, ports and (offshore) terminals. Furthermore, ship handling with tugs is team work between the pilot, ship’s team and tug’s crew. This includes several factors relating to ships operating in port areas, fairways, etc. affect the other parties as well, such as tugs, tug masters and pilots, and vice versa.
Below a number of important factors are reviewed which are at present crucial for the safe operations of tugs and will continue to play a role unless methods and procedures can be found to overcome the associated problems. Furthermore, autonomous and remote controlled ship sailing and the related risks will be dealt with, particularly in view of manned or unmanned operating, because it makes a large difference for tugs if future ships are manned or unmanned.
3.1 Challenges
As said there are some critical factors which will continue to play a role in future ship handling with tugs, which should be known when considering autonomous or remote controlled tugs, or when developing new assist methods for ship handling. These factors include challenging risks for a tug, tug crew and the attended ship [1]. Of course, factors like stability are of crucial importance as is seaworthiness, proper winches and tow lines, which becomes the more important as ship handling tugs will have to operate more and more in exposed conditions, outside the breakwaters and at offshore terminals. Such aspects can be optimized to a great extent by good design and appropriate deck equipment.
There are, however, factors which include risks which cannot be controlled by a tug master and are not dependent on tug design. These factors are:
- Interaction effects. A natural phenomenon exposing a tug in close vicinity to a ship at speed. An effect of increasing importance given the higher ship speeds, such as for instance of large container vessels. The tug experiences turning moments, suction and pushing forces. When, where and how strong these effects are is difficult to predict. Turning moments and forces can also change quickly. Especially near the bow of a ship the situation can turn into a risk. Interaction effects increase by the square of ship’s speed. Reducing ship´s speed will quickly reduce the interaction effects. Several accidents, more than once with dramatic consequences, have happened due to these effects. Ship speed and the resulting interaction effects are beyond the control of a tug master. A tug master has to cope with it and, if possible with respect towline passing, can decrease the effect on the tug, e.g. by increasing the distance between tug and ship. What anyhow is needed is an appropriate tug, capable to cope effectively with the interaction effects, and experienced tug handlers.
At present it is still difficult to represent the interaction effects the tug experiences in an accurate and reliable way in a simulator and for each ship, draft, trim and underkeel clearance, or the actions needed to control the tug. It is therefore an even larger challenge for autonomous or remote controlled tugs.
An AI (= Artificial Intelligence) `tug master’ can be properly trained by exposing such a `tug master’ many times in a simulation environment before starting the actual autonomous assist manoeuvres (so-called machine learning-ML); an environment which covers the interaction effects for each ship, draft, trim and underkeel clearance in an accurate way for instance when using CFD calculations. The AI `tug master’ then has to control proactively, using his relative position information, the unwanted turning moments and forces working on the tug and keep them below an agreed threshold value.
The supervision of practical experienced tug masters is essential during the simulations. With respect to the latter: 'DNV-GL is convinced that the combination of data-driven models and the causal knowledge of industry experts is essential when AI and ML (machine learning) are utilised to inform, or make decisions in safety-critical systems [26].'
- Ship speed. This is another critical factor as could be noticed above. Ship speed is under control of the pilot or ship captain, but not always. A maximum speed of 6 knots can be regarded as safe, although tug accidents near the bow have happen at lower speeds as well. Problems can occur on ships which have a very high Dead Slow Ahead speed of almost 9 knots.
For safe tug operations at high ship speeds and particularly near the bow, the right tug design must include a high maximum tug speed and good course stability which are crucial factors. If tugs would become longer this would already increase their maximum speed as well as their course stability. Or should they just limit their operations window more strictly again identifying these windows through many simulations?
Perhaps the earlier mentioned AI capabilities need to be added to the tug master’s tools to overcome unsafe operations near the bow of a ship at speed. Again, this is an important safety aspect for remote controlled and autonomous tugs as well.
Because of their relation with safe and efficient tug assistance, some other factors to be aware of are:
- Net tug forces should be known. When the propeller wash of a pulling tug is impinging on a ship’s hull, it creates a counter effect resulting in a loss of the generated towing force on the ship. The loss, which is hardly to predict, can be more than 50%. See for instance references [1, 29]. It might even be such that the ship moves in the opposite direction than the pulling force. This is caused by the Coanda effect.
Although both effects can be reduced to a certain extent by an experienced tug master by enlarging the distance between tug and ship and/or by changing the direction of the tug propeller wash, it should be kept in mind that if future tugs have to perform pulling operations, the forces generated by the tug are not always the net forces applied to the ship. For safe and effective ship handling and an appropriate balance of forces working on a ship, the net tug forces should be known. Which also applies to the negative or positive effect ship speed has on the towing force. A real challenge for further autonomy in ship handling with tugs. All these aspects have been explained in reference [1].
A system is needed that provides the pilot, in whatever future position, and a ship’s captain with the real and actual tug forces applied to the ship, including tug positions. The SafeTug System of Trelleborg Marine Systems [10] offers a first step in this direction. The Vessel Berthing Assist system developed by NYK and Japan Marine Science Inc is a more detailed system which visualizes the risk in the berthing operation, based on tug arrangement information, and on distance to wharf, ship speed, ship-performance parameters, and weather data [32].
- Connecting towlines. A crucial issue. At present in nearly all cases heaving lines are used for passing a towline. From the foregoing it will be clear that near the bow of a ship with headway the use of heaving lines includes risks, because the tug has to manoeuvre very close to the ship at speed and comes in a risky situation due to the effect of the earlier mentioned interaction forces. Whatever modern, remote controlled or autonomous, tugs will be developed, the fastening of tugs should be as safe as possible at speeds up to 10 knots. Clearly, as mentioned before, high maximum tug speeds and course stability ahead and astern becomes more important.
Alongside connecting is not such a problem, although also in that position lower speeds are preferred. A tug position at or near the stern can also be problematic because of the water flow around the ship’s stern. A tug approaching a ship from astern will, when coming closer, experience a speed increase due to the return flow of the water flow around the forward moving ship. The higher ship’s speed, the larger the `force’ that pushes the tug towards the stern. A tricky situation because the tug has to reduce speed in time; if not, the tug will collide with the ship’s stern. Therefore, in case of remote controlled or autonomous tugs, fastening at the bow and stern requires the most attention. Another challenge. The issue of connecting tugs will be addressed in more detail later.
Summarizing: In case future tugs, and in particular when autonomous and remote controlled, are operating in tug assistance mode, thorough insight is needed into the interaction effects between ship and tug and how to cope with the forces and turning moments created by these effects. Some suggestions have been done in the foregoing paragraphs. For correct working tug control systems designers need to have a thorough insight into the net tug forces applied to a ship. Furthermore, the safe connecting of tugs requires careful attention, which will be addressed in section 4. Only when these hurdles are overcome autonomous tugs and tug assistance could become close to reality.
3.2 Autonomous and Remote Controlled Sailing and Related Risks
No doubt, remote controlled or autonomous large ships and tugs are possible. This has already been proven by the tests carried out, which will be addressed in section 5. Unmanned would be the optimum situation. This has been realized for smaller work boats and is possible for certain smaller ships on a regular, preferably local, trade. The question is whether this is also an option for larger ships on international voyages and on tugs. Whether future autonomous or remote controlled ships are manned or unmanned is an important consideration for future autonomous and remote controlled tugs when for instance fastening, but also in case of emergencies for instance along the coast or in areas with a high traffic density and/or large wind mill parks. Some critical aspects of unmanned sailing will therefore be addressed now.
With respect to manned or unmanned autonomous or remote controlled vessels it is good to learn from experience in the aviation industry. Senior official of KLM Pieter Elbers says: `We are going to a `machine first – model’. Machines will do everything, only when it is becoming too complex, human beings will take over. In an aircraft the human being is the `failure mode’. If it is going wrong, the pilot will take over the control’ [16]. More such ideas can be heard, for instance from Steve Landells, flight safety specialist for the British Airline Pilots Association, who says: `However, every single day pilots have to intervene when the automatics don’t do what they are supposed to’ [17].
Experience with automated container terminals shows that `automated terminals are still less flexible compared to manual operations, and not yet competitive regarding peak productivity’ [18].
On ships the situation does not differ. During about a year the Dutch Captain Den Rooijen recorded on board of a freighter and a full container ship the number of failures during a normal trip. It was dozens, which all had to be solved by the crew [19]. This also confirms that high investments are needed to increase reliability, availability and (pro-active) maintainability to reach an optimum high safety level.
Not have been mentioned yet either are the casualties that still happen and their consequences. See for instance the type and number of casualties as shown the Annual Review of Marine Casualties and Incidents 2018 [23]. Insight into the causes of these accidents will help in preventing similar accidents in the future also when autonomous or remote controlled ships become reality.
It means that for future autonomous and remote-controlled ships and tugs reliability of all systems on board becomes extremely important and first to solve, which means the best possible maintenance based on condition based monitoring, redundancy for critical machinery and systems and an optimum sensoring and control for which a hundred percent reliability of sensors is enormously important seeing the recent accidents with the Boeing 737 MAX-8 (see monitoring modules at par. 2.1.1).
There are other critical issues if ships are unmanned, such as a Global Position System(s) failure [11, 20, 33], causing ships to lose track; no or unreliable AIS signals from other ships; shore- ship data transfer may fail too, leaving the ship out of control (if remote controlled) [11]; the risks of hacking; hackers are targeting the shipping industry for a variety of reasons; there have been reports of hackers remotely tampering with navigation systems and altering the course of a ship, either to commandeer the vessel or seize the cargo [11, 21, 22]; piracy; it becomes easier for pirates to board unmanned ships with the consequence of ship loss [11]; the consequences of a blackout, collision or grounding with autonomous unmanned ships loaded with dangerous cargoes, or with tankers and gas carriers, can be extremely high. Ships and persons in distress and other unforeseen situations at sea; how can for instance unmanned autonomous ships comply with the obligations to render assistance to ships and persons in distress? The IMO states in its present International Convention for the Safety of Life at Sea: `A master of a ship at sea, which is in a position to be able to provide assistance on receiving a signal from any source that persons are in distress at sea, is bound to proceed with all speed to their assistance’.
From the foregoing it also becomes clear that in case of autonomous or remote controlled ships, in some way communication between these ships and conventional ships should be possible. Some of these problems can be prevented by a high level of redundancy and an optimum remote control system. Other problems and risks can still only be prevented or the consequences be mitigated if a professional crew is on board. Some of the risks mentioned may occur at sea only, others may occur in port areas when approaching or leaving a berth or at an offshore terminal. A number of the risks mentioned may occur on board of tugs as well.
It can be concluded that in the near that future in case of autonomous or remote controlled ships they will most probably sail with a (limited) crew which is an important fact for tug assistance. Whether tugs will operate without crew will be discussed later.
Note 1: DNV-GL focuses in its paper `Position Paper 2017’ [27] on another vital aspect, viz. the importance of standardisation and discusses the need for standards in the following six areas: ship data models, sensor naming and referencing, maritime taxonomies and code books, sensor metadata, shipboard data recorder, sensor quality and reliability. It states that experience from pilot projects has shown that the lack of structure and systematics in the collection of operational data from ships impairs data quality and causes data loss, which in turn hampers applications and hinders the effective use of the data.
4.0 Connecting a Tug – A Critical Point and a Real Challenge!
Making the connection between a tug and a ship is an essential part of tug operations and at present often also the most critical part of ship assistance as has been explained. As mentioned before, for making a connection by a tug towline in nearly all cases a heaving line is used, which is thrown from the ship on the tug and to which the tug’s towline is made fast. This system has been used for more than hundred years and still works rather well in all circumstances. However, there are serious safety concerns about this old-fashioned system as is explained in chapter 3 and reference [1]. A safer system is therefore absolutely needed!
With the discussion about autonomous and remote controlled tugs the question becomes even more relevant because a crucial aspect for such tugs is also how to connect the tug to a ship in a safe and efficient way? This not only applies to harbour tugs, but to terminal tugs, escort tugs and emergency tugs as well.
The way to make a connection to a ship having speed on should go without risks for the tug, tug crew and the ship. It should therefore meet a number of requirements:
- In the first place the system should be safe, fast and generally applicable, taking into account the various ship types, locations of ship’s mooring equipment including height of ship’s mooring deck, which can be more than 20m. It should be possible to use it near the bow of a ship having a speed of up to 10 knots, not forcing the tug to come in the dangerous zone near the bow where the large interaction forces and turning moments are strong. It should not only work during fair weather, but also during rain, hail, snow, fog, ice and in wave conditions.
- The possibility to remotely operate the system, taking into account that in case a towline is used it has to pass through a fairlead on board the ship before it can belayed on a ship bollard, also when it has been released.
- The tug – ship connection should be flexible with the possibility that tugs can operate at a close distance to the ship as well as at an adequate distance off when pulling.
- Releasing the connection should be possible in an easy and, for the tug, safe way and remote controlled.
Various systems are in some phase of development. An overview is given in table 2. In the first column a rating is defined. Rating A is for normal situations which includes certain restrictions. Rating B means that the system can be used always, including extreme conditions. Figures 0-5 indicate the level of employability for rating A and B, with number 5 as the best.
Note 2: Please consider also the conditions of thunderstorms and lightning (not included in the table). Communication with remote controlled connection systems may be interrupted during thunderstorms/lightning strikes and high operating connecting systems may attract lightning with serious consequences.
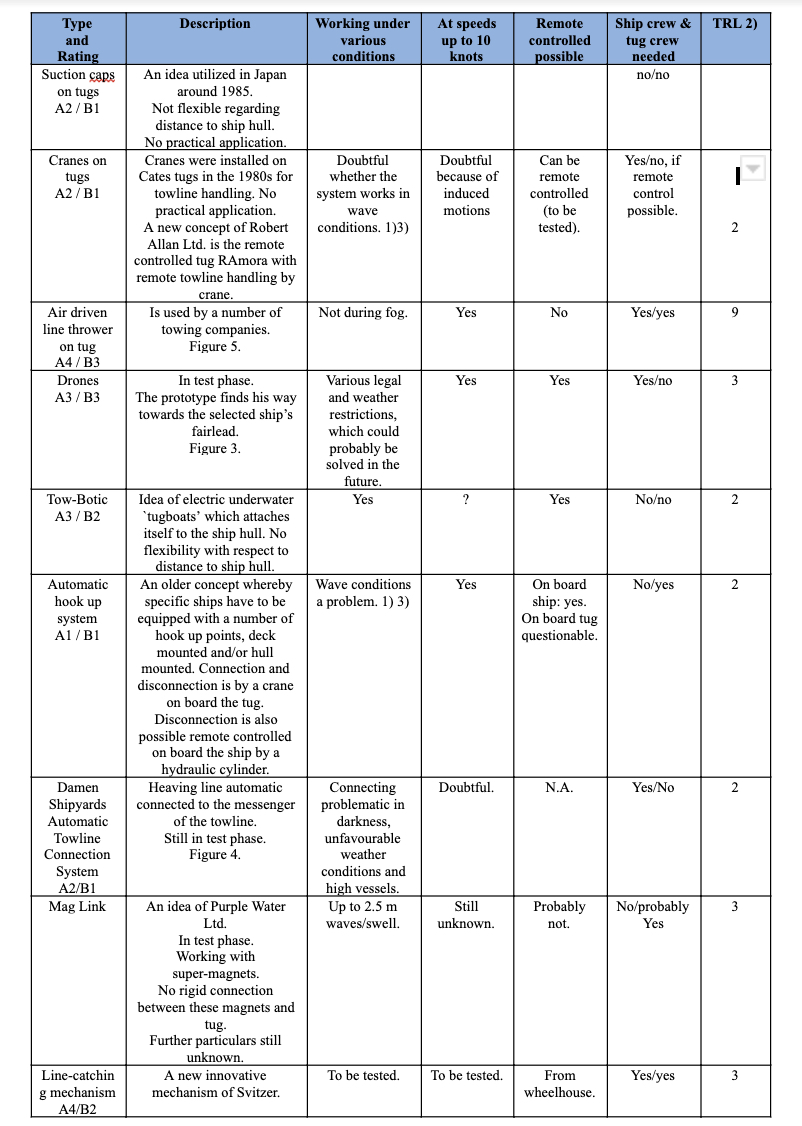
Table 2.Various tug-ship connection systems. 1) May work if some stabiliser system for tug movements is used on the tug. 2) Technology Readiness Level. 3) Improvement could be with the crane on a motion stabilizing platform.
From table 2 it can be seen that already for more than 30 years efforts have been made to develop an easy connection system, and that systems that were developed failed in the real world situations, except for the air driven line thrower. The air driven line thrower has also a few drawbacks, such as inaccuracy when used from a moving tug deck, the risk of hitting a ship’s crew member and limitations in case of reduced visibility. Nevertheless, it is used on some tugs.
Some systems could work best in case of push-pull operations, such as cranes, magnetic connection and automatic hook-up system, others will also work for fastening a forward tug such as the air driven line thrower.
If the limitations of drones could be overcome and no legal restrictions are in force for the use of them, it might become a good system to make a connection between tug and ship.
It should be realised that several vessels have an enclosed working deck forward and/or aft such as cruise vessels and several container vessels; so being unsuitable for the use of air driven line throwers and probably drones.
The table also shows that some systems (cranes) could be remote controlled, so far only in favourable circumstances. Improvements are possible if the crane could be placed on a stabilizer system compensating for tug movements e.g. due to waves.
It will be clear that significant developments are needed to be able to connect autonomous and remote controlled tugs not only in fair weather but also in unfavourable conditions and circumstances.

Figure 3. Drone for passing heaving line (source Kotug).
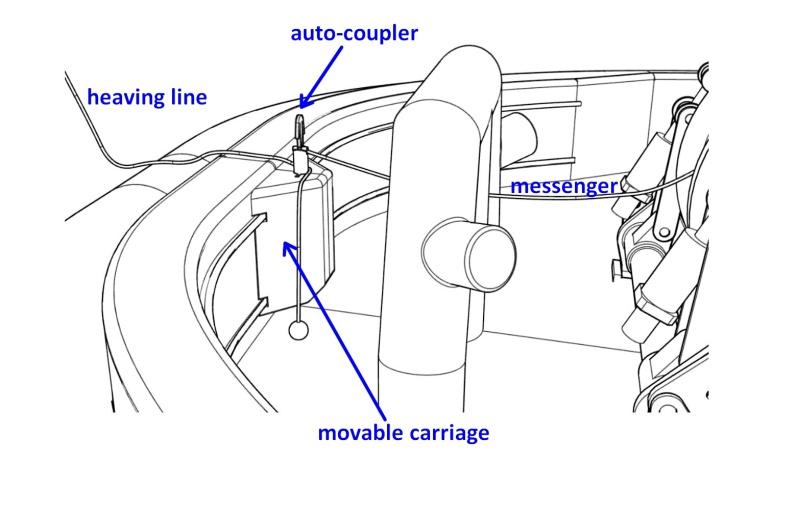
Figure 4. Auto towline connection system (courtesy Damen Shipyards).
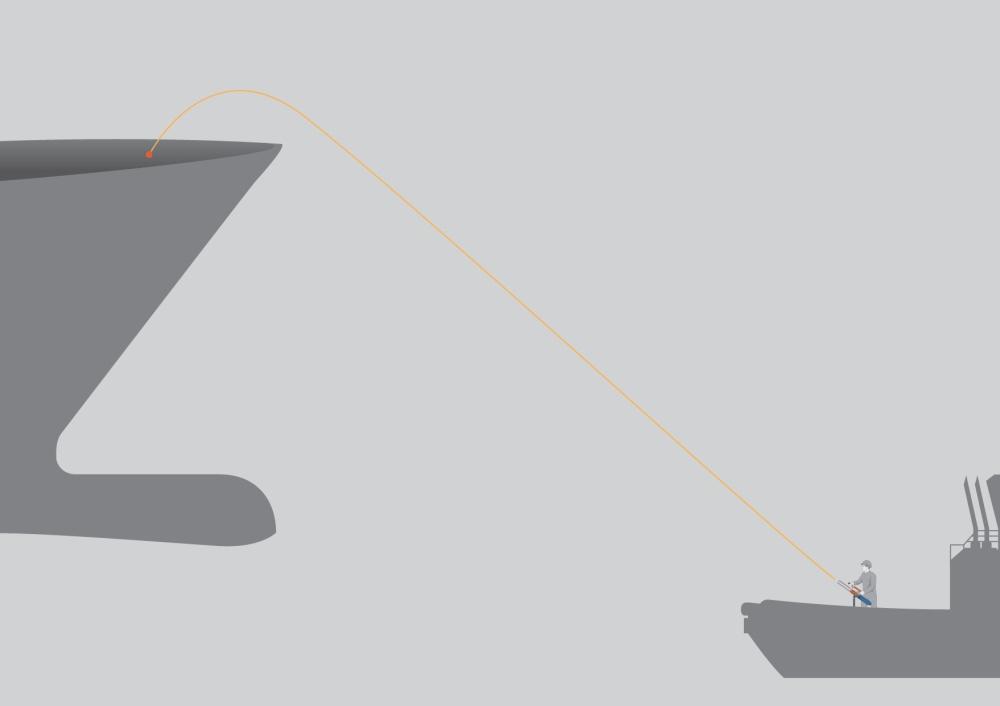
Figure 5. The use of an air driven pistol for making a towline connection (courtesy Restech Norway).
5.0 Present Concepts for Future Ship and Tug Control
What has been achieved up till now, what tests have been carried out and what are the future plans?
5.1 Tests Carried out with Tugs and a Ferry
Since 2017 various remote control and autonomous tests have been carried with tugs [1] and other types of vessels such as the remote control test with the 28m long free-sailing tug Svitzer Hermod in the Port of Copenhagen and with the free-sailing Highland Chieftain, an 80 m long platform supply vessel, in the North Sea. The remote control test of this vessel was carried out by the Wärtsilä office in San Diego, California over a distance of 5,000 miles. The towing company KOTUG carried remote controlled fire fighting and remote controlled sailings with the training tug RT Borkum. A remote controlled tow was carried out with the tug Giano. Furthermore, the 85m long ferry Folgefonn visited three ports autonomously, including docking and undocking, with no human intervention.
5.2 A Selection of Future Plans
An idea is to remote control the operations of multiple tugs to propel a barge flotilla, e.g. four groups of 20 barges, and precisely negotiate curves along rivers, such the Amazon river, Parana River and Lower Mississippi.
The Maritime and Port Authority of Singapore and Keppel Singmarine have the intention to develop autonomous vessels, which will be used for a variety of applications including harbour operations such as berthing, mooring and towing operations. It includes the development of the first `autonomous’ tug by 2020, to be operated by Keppel Smit Towage. An existing 52 tons bollard pull will therefore be upgraded with collision detection and avoidance, digital pilot vision and position manoeuvring devices. An onshore command centre will be built to remotely operate the tug. A digital twin of the tug will be produces to simulate tug’s behaviour and optimise its operations.
Singapore’s Maritime and Port Authority, Lloyd’s Register, Wärtsilä, PSA Marine Singapore, etc. are working on an intelligent harbour tug, the IntelliTug, to test technical systems that can assist masters in collision detection and avoidance and virtual anchoring with enhanced situational awareness at night and in complex situations. It involves retrofitting the 2018-built tug PSA Polaris with a sensor and smart navigation package. Included is a Digital Twin of the tug to simulate vessel behaviour in multiple scenarios. PSA Marine head of fleet management Bernard Wong says tug masters will maintain control, with additional information and advice from IntelliTug: “There are many instances in towage operations where we feel the tug master is still very much needed. They rely on their skills and the training provided, and even on their instincts. We believe more can be done to aid tug masters in their day-to-day work.”
Japan's Ministry of Land, Infrastructure, Transportation and Tourism planned a remotely controlled ship demonstration project for the practical implementation of autonomous ships by 2025. The philosophy in Japan is that harbour tugs are viewed as likely to be one of the first vessel classes to become autonomous.
Rolls-Royce is studying automatic mooring technology as part of its autonomous tugboat concept. The company is looking at developing robotic cranes that could be used for hooking up ships to tugs during towage operations.
The Yara Birkeland is an electric, self-docking, self-unloading, autonomous unmanned 120 TEU open top container ship of 79.5m long, fully battery powered, which will be delivered in 2020, and will gradually move from manned operation to fully autonomous operating by 2022.
6.0 Future Ship Handling with Tugs
The changes in future composition of the world shipping fleet, and changes in cargo and cargo handling places, hurdles to be taken on the way towards autonomous ships, it all has been discussed in the former chapters focussing on the effect it has on the requirements for future tugs and tug assistance. It has furthermore been shown what has been achieved up till now regarding autonomous and remote controlled tugs. It is all essential material for a proper insight into future autonomy of ships and tugs, starting with the lessons learned from tests carried out.
6.1 Lessons Learned
Recent tests with respect to future ship handling with tugs show two important results:
- Autonomous sailing and remote control of a tug is possible, even over a long distance between remote control station and tug, provided the tug is equipped in a suitable way and optimum data transfer systems are used.
- Autonomous berthing and unberthing is possible.
What Has Not Been Tested
- With respect to ships and tugs there is an essential difference between the tests and the way ship handling tugs operate in practice: The future autonomous container ship mentioned in the former section will travel just one and the same relatively short track, from a fixed point A to a fixed point B; there might be one or more fixed way-points along the track which does not differ in essence. These are not the typical operational kind of tracks tugs and also most ships follow.
- Connecting tugs to ships has not been part of the tests.
- Autonomous or remote operations have not been carried out in adverse conditions of low visibility/fog, rain, hail, snow, wind, waves and ice.
Regarding issue 1), tug movements, particularly during ship assistance, are quickly changing and are in no way standard. During ship assistance with a tug towing on a line situations such as positions, headings, steering, engine rpm’s, forces generated, direction of movements, it is all rather unpredictable and changes continuously and frequently. Such actions carried out by the tug master, all dependent on the required ship movements and interaction effects and environment conditions working on the tug, are hardly programmable and then easily subject to risk of faulty/unpredictable codes.
In-depth studies are needed, and simulations, to determine if these tug actions can be carried out autonomously. For free sailing of tugs, for instance from the tug base towards a ship to be attended, or from a ship back to the tug base, far less control is needed and a certain level of automation is considered feasible.
In case of push-pull operations tug actions are less complex and tug position relative to the ship does not change because the tugs are normally fastened to the ship’s side. But tug heading, engine rpm’s and forces change continuously. The relatively fixed position at the ship’s hull may be the reason for the philosophy in Japan that harbour tugs are viewed as likely to be one of the first vessel classes to become autonomous. Although `remote controlled’ would be a more realistic assumption.
Connecting tugs, issue 2), has been discussed in detail in section 4 and is of crucial importance for autonomous as well as for remote controlled tugs.
Issue 3) affects autonomous and remote controlled tug actions and should be tested.
It means that in addition to the critical aspects mentioned in section 3 there are more aspects requiring attention.
6.2 Autonomy of Tugs
In section 2 four degrees of ship automation have been mentioned, which applies to tugs as well:
- Degree one: Tug with automated processes and decision support. Tug crew is on board.
- Degree two: Remotely controlled tug with crew on board.
- Degree three: Remotely controlled tug without crew on board.
- Degree four: Fully autonomous tug: The operating system of the tug is able to make decisions and determine actions by itself.
There can be added:
- Degree five: Fully autonomous tug with (limited) crew.
If tugs would operate autonomously, it would have significant advantages with respect to reduction in manning. The question should be asked: Is this feasible and is this acceptable? Whether it is acceptable depends on the port or country. Low wage countries and those with a large number of unemployed people will not be interested in crew reductions. Feasibility will be addressed below.
Let us assume that a system has been developed which makes connecting of a tug to a ship possible in a safe and fast way and at rather high ship speeds and without the need of a person on board the tug to handle the connection system. Would then autonomous tugs without a crew on board the tug (degree four) be feasible? If weather and sea conditions don’t present a problem and the critical aspects of section 3 (interaction effects, net tug forces, technical failures on board, etc.) can be handled or prevented, unmanned autonomous tug assistance can become a possibility, however, due to the complexity not directly expected to be realized in the near future.
This brings us first to remote controlled tugs, still unmanned. Remote controlled (degree three) tugs -or autonomous tugs that can be remote controlled- still assuming that the earlier mentioned tug-ship connection system has become available, will now be considered. How the tugs will be controlled in the control stations, by duplicating a tug control station, with the use of touch screens, voice recognition, etc. is not relevant for this discussion, as long as it works in an optimum way in normal conditions and in adverse conditions of fog, rain, hail, etc.
Let us take as an example of a middle sized port with ten tugs, all capable of being remote controlled. Each tug needs one control station and each control station needs an experienced tug master, who also should have been trained carefully in remote controlling of tugs. It is true, not all company tugs are always needed at the same time, but conditions might be busy in the port or strong winds are blowing and then all the available tugs are needed.
As said, with a crewless tug a lot of money can be saved. Unmanned remote controlled tugs can also be used for fire-fighting if equipped as such, as has been proven by KOTUG, Rotterdam and even company tugs operating in some other (foreign) port can be operated remote controlled. On the other hand the several control stations, including maintenance, also cost a lot of money, and a large number of tug masters/ tug controllers is needed for a 24/7 service. In addition, ICT (Information and Communication Technology) systems become much more complex and more ICT specialists are needed. It should also be kept in mind that the tug and its engines need regular maintenance and should be regularly cleaned.
Although this costly system with several control stations can work, it is questionable if this is the optimum solution. The best would be to have a limited number of remote controlled tugs and the rest normally manned (degree one and three). Why? Because this has the advantage that less control stations are needed and practical experience in tug handling and ship assistance does not get lost and tug master can, if well trained, shift between a manned tug and the control station. Another important point to have a number of tugs manned is that harbor tugs have to carry out several other tasks as has been explained in par. 2.1, for which a full crew is needed. Furthermore, well-designed and equipped seaworthy harbor tugs have also more than once to operate at sea in case of emergencies or for offshore tasks, requiring the tugs also to be fully manned.
If a tug crew is still needed for securing, then of course even a remote controlled tug should be manned.
Summarising, it can be assumed that in the near future a modern towing company may has a small number of remote controlled tugs, which are manned as long as not yet a remote controlled tug–ship connection system is available and also depending on the work to be carried out. The other manned tugs will remain available. It will take a number of years more before autonomous tugs become reality.
A question to be answered is whether port authorities and shipping companies agree with the employment of autonomous or remote controlled tugs, manned or unmanned.
6.3 Autonomy of Ships
An important aspect for tug assistance. In section 3 it has been concluded that autonomous or remote controlled large ships will have a (limited) crew on board. Not have been included in the conclusion how to pass for instance the Suez Canal or Panama Canal with an unmanned autonomous ship, or whether ships can operate autonomously in all weather conditions, including dense fog, in areas with a very high shipping intensity and/or oil rigs and wind farms, such as the English Channel, North Sea, Singapore Strait, South East Asia Coasts, etc.. At least risk analyses have to be carried out.
Therefore, for the medium term it will be assumed that (partly) manned autonomous and remote controlled ocean going ships will start trading between ports and terminals. Many ships with no or lower degree of autonomy will be seen as well.
With a crew, autonomous or remote controlled large ships can also safely enter a port. The crew can fasten tugs and handle the ship lines when mooring as long as no automatic tug connection and an automatic mooring system at the berth or terminal is available.
Because of the complexity of many ports the help of a local professional is needed to guide the ship in and out the port or towards and from a terminal; a nautical professional with a thorough knowledge of the port, tides, currents, depths, shipping traffic, port services, infrastructure, rules and regulations and very experienced in ship handling. All such information could be provided to the ship’s bridge team. Would that create a safe situation for e.g. a 400m long container ship and a bridge team not optimal familiar with the port, the circumstances in the port, and its services? And what about adverse weather conditions? All puts extra pressure on the ship’s captain; the bridge team also has to direct the tugs, whether remote controlled or not. For the largest ships safety margins in ports and port approaches are at a minimum. Reasons to keep the ship under control in the most safe way. With specific tools, such as an accurate ECDIS and docking system, and thorough training on a simulator based on the particulars of the port and optimal port information service, it would improve the capabilities of the bridge team on board the ship and enlarges the possibilities for e.g. remote pilotage or no pilotage at all. In case of remote pilotage, one pilot is then dedicated with one ship. The same is the case for a controller if the ship would enter the port remote controlled.
Therefore, would it not be better to have the pilot on board manned autonomous or remote controlled ships particularly in busy ports with all different kinds of traffic around and during adverse weather conditions? Whether a pilot is on board or a ship’s bridge team has to direct the tugs is an important factor for the attending tug masters to know. However, much depends on the port’s strategy, rules and regulations, what will be allowed in a port and what is accepted in case of autonomous or remote controlled ships, with or without crew, with or without a pilot on board, or with remote pilotage.
Summarising: In the near future ships, whether autonomous or remote controlled, will have a crew on board in port areas. Autonomy on board many ships will gradually increase as is the case with decision support systems on the bridge, enabling the bridge teams to navigate in port areas or near terminals with accurate position and docking information and on board simulations. Pilots will still board the ship.
On the longer term and for certain well equipped ships pilots may stay ashore for remote pilotage. Much depends on to what extent autonomy on board ships have been realized and on the port’s strategy.
6.4 Future Ship Handling with Tugs in Ports, Port Approaches and Offshore Terminals
Based on what has been discussed in the former paragraphs the expected situation with respect to ship handling with tugs till 2050 will now be addressed. The time span of about 30 years from now on till 2050 will be split in two periods. One from now on till 2030 and then the second period from 2030 till 2050. For the period 2030 – 2050 it will just be a prudent rough guess.
The foregoing sections are boiling down to the developments and expectations as indicated in the following two paragraphs.
6.4.1 Period till 2030
The period till 2030 is particularly interesting for the continuation of tests focusing on remote controlled and autonomous operating of ships and tugs, and for the results already achieved in this field. Rules and regulations will be prepared or come into force for future autonomous sailings.
Ship fleet and amount of cargo to be transported increases; a proportional change in types of cargo takes place; new types of transport are tested; size of certain ship types as well as maneuverability in restricted waters increases; ports infrastructure changes keeping pace with the ongoing developments in shipping, change in cargo and new transport modes; tugs have to operate more and more in unsheltered waters; tugs are upgraded for increased performance, safe operations and for meeting the requirements of new developments in shipping, ports and berth locations.
There is an increase of autonomy and remote control possibilities of vessels and tugs, but also a large variety in it (see note 3). More and more relatively small ships will be seen sailing and berthing/unberthing autonomously, in particular those ships that travel a fixed route between ports as ferries do, and in particular small workboats.
In case larger ships would cross the oceans, sail between ports and terminals and operate in ports autonomously or remote controlled, which is possible, it will be with a (limited) crew. See also note 3. This also because ships that need tugs are not yet prepared for autonomous securing of tugs and automatic mooring systems are not yet commonly available hence ship’s deck crew will still be needed. Pilots will also still be on board.
Even when tugs can be remote controlled, most tugs will still be manned as before. One of the reasons is that not yet a general applicable remote controlled tug securing system will be available on board tugs. Depending on the tasks tugs have to carry out some tugs may operate in ports remote controlled without a crew.
On the way towards further autonomy of tugs and ships, system engineering based design, remote control systems, sensored actual environmental conditions and decision support systems will find increasingly their way to tugs and ships, leading to improved availability and reliability of systems and increased safety of operations.
Training is needed ever more than before, not only because of the new developments but also because present training is far from optimal as accident investigation reports show (see note 4). More and more use will be made of new developed training systems ashore and on board such as Virtual and Augmented Reality.
Note 3. DNV-GL [25]: 'The technology clearly has the potential to reduce or even eliminate manning on ships, but it is not evident from a safety, sustainability, commercial and societal perspective that this will always be the better solution. It is therefore our opinion that there will be, for the foreseeable future, a role for both conventional manned ships and a large variety of ships with different levels of integrated digital systems and autonomy.’
Note 4: "The causes of maritime accidents in the period 2002-2016" [28], is a report for which a total of 693 accident reports of six marine investigation boards were analysed. 'Inadequate risk management’ was most commonly identified as both an immediate and a contributory cause of accidents. ‘Failure in communication’ is another often identified cause of accidents. It is the most frequently identified immediate cause of groundings and the second most common immediate cause of collision, contact and close quarters incidents. Interesting to study the whole report.
6.4.2 Period 2030-2050
The situation 2030 – 2050 is based on what has been achieved before 2030. However, all predictions for this period have a high level of uncertainty related to future political and economical developments, possible (trade) conflicts and other crisis in the world, which also may have a large impact on industrial developments and seaborne traffic. Epidemics can be a large disturbing factor too. A factor of which the effect is still uncertain is the climate change. How will this affect water levels, tides, seasons and consequently agriculture and economics in the various parts of world, and consequently sea trades, shipping traffic, ports and ports’ infrastructure?
Another factor to be taken into account is that of ships and tugs built around 2020 some may still be operational in 2050. It means that during the period of 2030-2050 there will still be a mix of ships and tugs with various levels of autonomy. In addition, the situation may still differ by country.
A prudent prediction, with reservations as mentioned above, for the more developed countries is as follows:
- General. Ship fleet and amount of cargo to be transported has increased with proportional changes in types of cargo; new types of transport have been realized; size of certain ship types as well as maneuverability in restricted waters has increased; ports infrastructure has changed keeping pace with the developments in shipping and cargoes; an increase of offshore jetties and terminals can be seen requiring tugs to operate more often in unsheltered waters as is the case with the need to fasten large ships outside the breakwaters; performance and particularly safety of operations of tugs have been further upgraded, not necessarily being all the same types of tug as before, and they will meet as far as possible the requirements of new developments in shipping, ports and mooring locations.
- Autonomous and remote control. On board ships and tugs there is a significant increase of data sensoring, collection and transfer, of decision support systems, systems for autonomous and remote controlled operations with remote control stations and data analyzing systems ashore. Levels of these modern systems on board ships still vary by ship and country. The number of ships and tugs able to operate fully autonomously and remote controlled further increased. A high level of redundancy of various systems can often be found on the ships that operate autonomously.
- Manned- unmanned and related issues. Ocean crossing autonomous and remote controlled ships will be manned till it has been proven that the crew can be reduced because of proven safety, workability and reliability of autonomous and remote control systems, and allowed by maritime organisations. This differs however by sea route. When manned it is also possible to vary the degrees of active autonomy through the voyage according to the assessed risks. Navigational watch keeping duties would then at times be fulfilled by autonomous systems, but with humans at call [30].
It is most likely that also in areas with a high traffic density, and in ports, port approaches and at offshore berthing locations, autonomous and remote controlled ships will be (partly) manned, although for other ports and berthing areas depending on the specific local situation.
A system becomes available that no ship’s crew is needed anymore for securing tugs, while for tugs it becomes possible to connect autonomously or remote controlled to a ship.
Automatic berthing systems have been realised at several berths (see figure 6 of Trelleborg AutoMoor and reference 37 for MacGregor Automated Mooring System).
Application of these systems will take place step by step and also has a large effect on manning of ships and tugs and on the possibility of autonomous operations.
Tugs will be normally manned. A small number of tugs will be remote controlled or in a later stage can operate autonomously (see figure 7), sometimes with a limited crew on board.
- Transport systems. New transport systems and offshore terminals/jetties will have become operational.
- Traffic control. Stricter traffic control will be needed for busy ports when the number of autonomous and remote controlled ships increase (see figure 8) .
- Pilot service. Pilot services undergo a continuous change keeping pace with the degree of manning, of automation and decision support systems on board ships, the level of training of the bridge team and the way tug assistance is carried out. Remote pilotage will increase.
Finally, public perception will no doubt play a significant role in how fast autonomous operation of ships and tugs will be realized [30]. Apart from the former predictions and the results of risk assessments carried out, ports and offshore terminals will have their specific rules and regulations about autonomous and remote controlled ships, tugs and pilotage, and state what is allowed in the areas they have under control.

Figure 6. Automooring system (picture by Trelleborg Marine Systems).
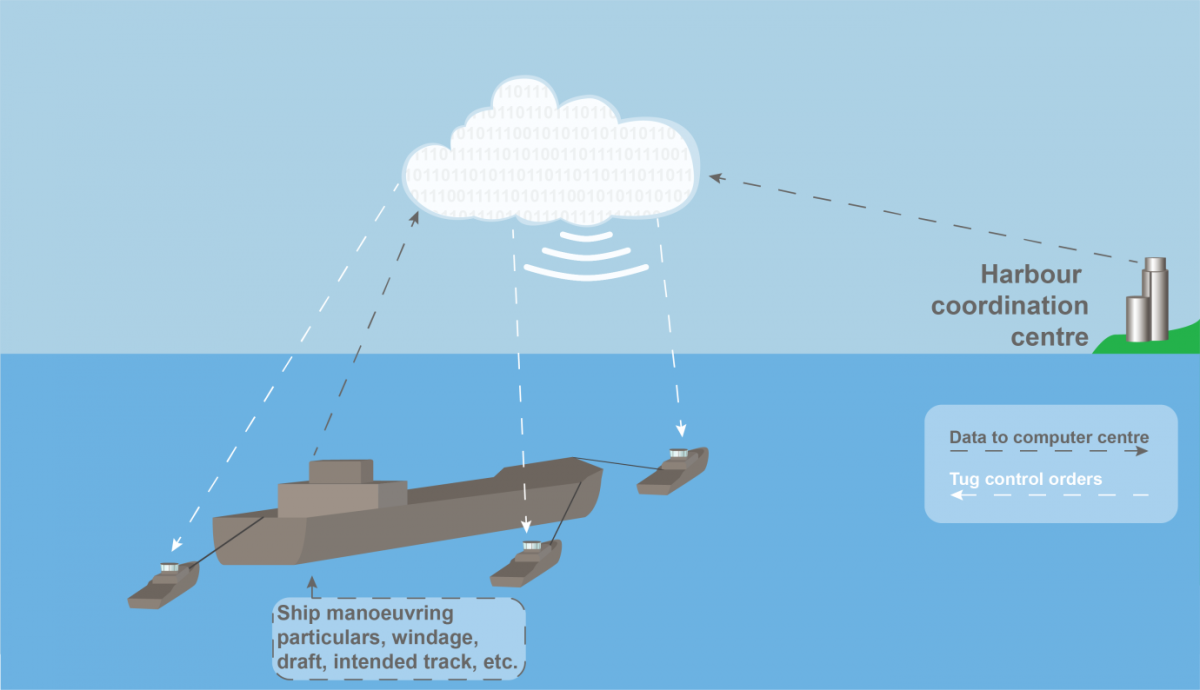
Figure 7. Futuristic ship handling with autonomous tugs. Tugs operate autonomously based on weather and tidal information, ship’s particulars, tug performance data and on ship’s intended track and speed information.

Figure 8. Entrance Port of Rotterdam on 12 February 2019. Ships Concerto, Mukebo Maersk, Mary a & Patmos. In case of further autonomy of ships, strict traffic regulation is needed (picture by Kees Torn).
7.0 Related Issues
7.1 Legal Aspects
Much work has been carried out by IACS and Classification Societies. For instance in December 2017 Bureau Veritas published the Guidelines for Autonomous Shipping [11] which includes amongst others guidelines for functionality and reliability of autonomous systems. September 2018 DNV-GL published Guidelines for autonomous and remotely operated ships [12]. Both include also guidelines for remote control centres.
IMO has commenced work to look into how safe, secure and environmentally sound Maritime Autonomous Surface Ships (MASS) operations may be addressed in their instruments. `Maritime Autonomous Surface Ships (MASS)’ is defined as a ship which, to a varying degree, can operate independently of human interaction [13, 38].
Countries are also developing regulations for remote-controlled or autonomous shipping, such as the Russian Government which is working intensively to develop national regulations to provide a legal framework for unmanned shipping [14].
Maritime UK published a Code of Practice for Maritime Autonomous Surface Ships up to 24m in length in November 2018 [15].
An important aspect requiring attention is the responsibility, liability and in particular the position of the master in case of accidents with autonomous or remote controlled ships and tugs. Also to be considered is the question of liability if there is an accident with such ships or tugs.
On the route to autonomy also port authorities will be highly determinative in setting safety driven rules and regulations for port entrance. Increasing levels of autonomy could lead to changes in the legal regimes in ports and putting both vessel management, pilotage and tug assistance in a more dominant role. The latter option is further stimulated by today’s ports not only aiming at shore power for moored vessels as a contribution to local climate issues but also to require vessels to enter and manoeuvre inside the port completely under ‘tug power’, (if possible!). Tugs themselves possibly becoming completely/partly hybrid- electrified.
Note 5: Future tugs will probably be electric driven, but energy source may be electric batteries or other (future) fuels. See also par. 7.2.2.
Before autonomous ships starts to travel between various countries, an international cooperation and a certain level of uniformity in ship handling is needed.
7.2. Parallel Developments
Parallel with the developments as discussed there will also be continuous improvements of:
- safer tugs;
- cleaner and more economical engines /drive systems for ship and tug propulsion.
7.2.1 Safer Tugs
Many accidents happen due to interaction effects, especially near the ship’s bow, as already have been explained, due to a improper stability, or a towing point near the centre of the tug, no proper working winch release systems, lack of sufficient seaworthiness, but very often also due to the lack of knowledge and skills of tug masters..
As explained, when operating at the ship’s side interaction effects play a smaller role than when tugs are towing on a line. Nowadays, particularly for towing on a line, tractor tugs – and also ROTOR tugs- are safest, because of the propulsion units are located forward and the towing staple lies far aft. This in combination with a high bow and stern, as is the case with the new RSD tug, also creates safer tugs for bow operations. Also the use of a carrousel system improves to a great extent the safety of tug operations, particularly of conventional tugs.
Stability is always a matter of concern, as is a proper freeboard, and becomes of even greater importance when harbour tugs and terminal tugs have to operate in wave conditions as is also the case with escort tugs. Automatic closing of watertight doors is also as matter of safety. The same applies to a system preventing flooding of tugs though engine room vents without causing the engines to stop, such as for instance is achieved with the SaferVents system [31].
Training in safe procedures and developments of ever safer tugs, which even could be of a total different type, and –important- safe connection systems, will lower the number of accidents that happen. See also reference [1].
7.2.2 Cleaner and More Economical Engines for Ship and Tug Propulsion
The energy transition along with the continuous strive for efficiency and cleaner ports will change the propulsion scene both for ships and tugs. Electrification of the prime mover seems the most logic way ahead as it provides flexibility towards future changes in the primary energy source (gasoline, LNG, methanol, ammonia, hydrogen) and related conversion systems (generator/batteries, fuel cell [34], etc.).
The concrete operational profile and ship type determine the final choices made within the multiple configurations available, off course under the assumption of proven technology, energy availability and competitive energy cost. Electrification in general will enhance the much needed reliability and availability of the onboard systems.
Ships and Ports
The envisaged common electrification of the prime mover and the abundant availability of electrical power on board enables a flexible, reliable and powerful response of the prime mover and potential other manoeuvring devices both as a design option and during the port operations. Certainly not all electrified vessels will enhance their independent manoeuvring capability; however vessel types subject to further automation and possible autonomy surely will have additional manoeuvring devices. These developments could lead to less tug involvement.
Essentially autonomy could move in two directions:
- Ports, like airports, increase their legal responsibility for more direct safe ship/traffic control in their port environment and add (autonomous) tugs to the system for the ultimate control. Cleaner and safer ports could add to that ambition by using electric tugs completely in charge of towing the dead ship, as far as safely possible, to avoid any pollution.
- Ports more strictly regulate vessels in their ports but rely on a high level of data exchange on port passage planning and the total traffic picture. Tugs are an option.
Tugs
Tugs themselves are a prime target for a fast energy transition and locally clean operating practices. Their short operation range and interrupted short high power operation predispose them for an all battery or a fuel cell/battery based energy supply and propulsion system. Various examples of these hybrid tug propulsion systems do already exist [1].
The hybrid systems use either a direct drive diesel engine or an electric motor fed by batteries and/or generators to propel the tug. The above solution is recognised as an expensive investment but operationally saving on fuel and maintenance, hence a future proof option. Obviously when in port it can be connected to a shore system. Also full battery based propulsion systems exist.
Future tug propulsion systems, in particular when serving tugs with longer sailing distances and/or with a heavy duty operational profile, could use hydrogen based fuel cells, if more compact tugs are required renewable methanol could be the energy provider feeding the fuel cells.
Final Remarks
Ship handling with tugs is the work of pilots and tug masters. It is a very practical job. Based on the knowledge and experience of these professionals, thousands of ships enter and leave ports in a safe way. But the theory behind, the knowledge of naval architects, hydrodynamicists, engine, rope and winch manufacturers, is of equal importance.
To achieve the best future results, a close cooperation between both groups is needed. This is missing in almost all working groups involved in the development of future ships and tugs and future ship handling with tugs. This is a real shortcoming as all should know how important experience built up during daily practice is for new developments and this becomes the more important in case of autonomous and remote controlled ships and tugs.
With the increasing autonomy of ships and tugs this experience should not got lost because it becomes the more valuable.
Authors/Contributors
- Henk Hensen: Master Mariner F.G.. Former Rotterdam pilot, Marine Consultant, Author of amongst others the book `Tug Use in Port. A practical Guide ’ and together with Markus van der Laan of the book `Tug Stability. A Practical Guide to Safe Operations’.
- Johan de Jong: Naval Architect involved in many studies and research projects related to tug behavior in operations, vessel (hydro) design and port developments.
- Markus van der Laan: Naval Architect involved in the development of innovative maritime systems on ships and tugs and integration in the design.
- Daan Merkelbach: Over thirty years of experience in the towage industry. Former tug captain on all drive systems. Now being manager Tug Training and Consultancy at “Tug Training & Consultancy B.V.", see tugtraining.com.
References
- Tug Use in Port. A practical Guide. Captain Henk Hensen. The ABR Company Ltd, UK. 3rd edition. 2018.
- IMO MESC Identifies 4 Degrees of Ship Automation. World maritime News. 17 December 2018.
- Review of Maritime Transport 2018. UNCTAD.
- IGP&I International Group of P&I Clubs. Annual Review 2017/18.
- World’s 1st Intelligent Very Large Ore Carrier is Here. World Maritime News.29 November 2018.
- Moving Containers at High Speed through a Tube Control Could Become a Reality at Hamburg Port. World Maritime News. 5 December 2018.
- Energy Transition Outlook 2018. DNV-GL.
- Maritime Forecast to 2050. Energy transition outlook 2018. DNV-GL
- The blue future: Horizon 2020 project Space@Sea. Marin report. December 2018.
- SafeTug to Enhance Safety among LNG Carrier Tugs. Towingline 30 December 2018. Source: MFame.
- Guidelines for Autonomous Shipping. December 2017. Guidance Note Nl 641 DT R00 E. Bureau Veritas.
- Guidelines for autonomous and remotely operated ships. DNV-GL. September 2018.
- IMO News. Autumn 2018.
- PortNews. Relevant topics. eNav, Autonomy, Digitization as 4th Edition of Industry Revolution. 14 September 2018.
- Being a responsible industry. Maritime Autonomous Surface Ships. UK Code of Practice. A Voluntary Code . Version 2. November 2018. Maritime UK.
- Weekblad Elsevier. 25 September 2018 (in Dutch).
- The Guardian. Pilotless planes: What you need to know. Patrick Collinson. 7 August 2017.
- DS Research: 9 Pct of Global Terminals Are Semi-Automatic. 28 September 2018.
- Notice to Master Mariners ( in Dutch).
- GPS problems and how mitigate them. Safety4Sea. 9 November 2018.
- The Threads and Opportunities of Autonomous Ships. Allianz.June 2018.
- The Guidelines on Cyber Security Onboard Ships. BIMCO, CLIA, ICS, etc. December 2018.
- Annual Overview of Marine Casualties and Incidents 2018. European Maritime Safety Agency.
- Maritime 2050. Navigating the Future. Department for Transport. UK.
- Remote-Controlled and Autonomous Ships in the Maritime Industry. Group Technology & Research, Position Paper 2018. DNV-GL.
- AI + Safety. Group Technology & Research, Position Paper 2018. DNV-GL .
- Standardisation as an enabler of digitalisation. Position paper 2017. DNV-GL.
- The causes of maritime accidents in the period 2002-2016. Acejo, I., Sampson, H., Turgo, N., Ellis, N., Tang, L.. Cardiff: Seafarers International Research Centre. 2018. Online at: https://www.sirc.cf.ac.uk/Uploads/The%20causes%20of%20maritime%20accidents%20in%20the%20period%202002-2016.pdf
- JIP Safetug MRIN. Summary of Safetug results, MARIN Report 21938-16-MSCN, June 2012. www.marin.nl
- Seaways. February 2019.
- Tug Stability. A Practical Guide to Safe Operations. Henk Hensen and Markus van der Laan. ABR Company Limited, UK. 2016.
- NYK Develops System that Assists with Vessel Berthing. NYK. New Releases. March 12, 2019.
- Report: Russian GPS Spoofing Threatens Safety of Navigation. The Maritime Executive. Dana A. Goward. 2 April 2019.
- Fuel cell future depends on hydrogen and batteries. Gavin Lipsith. 24 April 2019.
- Svitzer begins sea trials of new line-handling technology. Press release. Towingline 26 May 2019.
- First autonomous tug in 2020. Martyn Wingrove. 22 April 2019.
- World’s 1st Autonomous Ship to feature MacGregor Automated Mooring System. World Maritime News. June 13, 2019.
- Marine Safety Committee (MSC), 101st session – Media information. IMO Meetings. Marine Safety Committee (MSC.101) 5 – 14 June 2019.
- MASS: a mammoth task. IACS is helping the shipping industry to grips with MASS.
- Mikhail Musunov, IACS Safety Panel Chairman.